Justin Kerr

I'm a 5th year PhD at Berkeley's AI Research Lab, co-advised by Angjoo Kanazawa and Ken Goldberg. My research focuses on advancing robot perception for real-world manipulation through 3D multi-modal understanding, 4D reconstruction, tactile sensing, and active vision.
I maintain Nerfstudio, a large open-source framework for 3D neural reconstruction, and am supported by the NSF GRFP. I'm currently an intern at Amazon Frontier AI Lab, and previously interned at Google DeepMind on the Gemini Robotics team.
Before Berkeley, I did my undergrad at CMU where I worked with Howie Choset on multi-robot path planning. I also spent time at Berkshire Grey on warehouse bin-packing automation and NASA JPL, where I was lucky to be involved in early work on a moon rover tech demo.
Papers
GaussGym: An open-source real-to-sim framework for learning locomotion from pixels
Alejandro Escontrela, Justin Kerr, Arthur Allshire, Jonas Frey, Rocky Duan, Carmelo Sferrazza, Pieter Abbeel
arXiv 2024
arXiv Website A real-to-sim framework for training robot locomotion policies from RGB pixels in IsaacGym using Gaussian splatted scenes.
Eye, Robot: Learning to Look to Act with a BC-RL Perception-Action Loop
Justin Kerr, Kush Hari, Ethan Weber, Chung Min Kim, Brent Yi, Tyler Bonnen, Ken Goldberg, Angjoo Kanazawa
CoRL 2025
arXiv Website We train a robot eyeball policy to look around to enable the performance of a BC arm agent. Eye gaze emerges from RL by co-training with the BC agent and rewarding the eye for correct arm predictions.
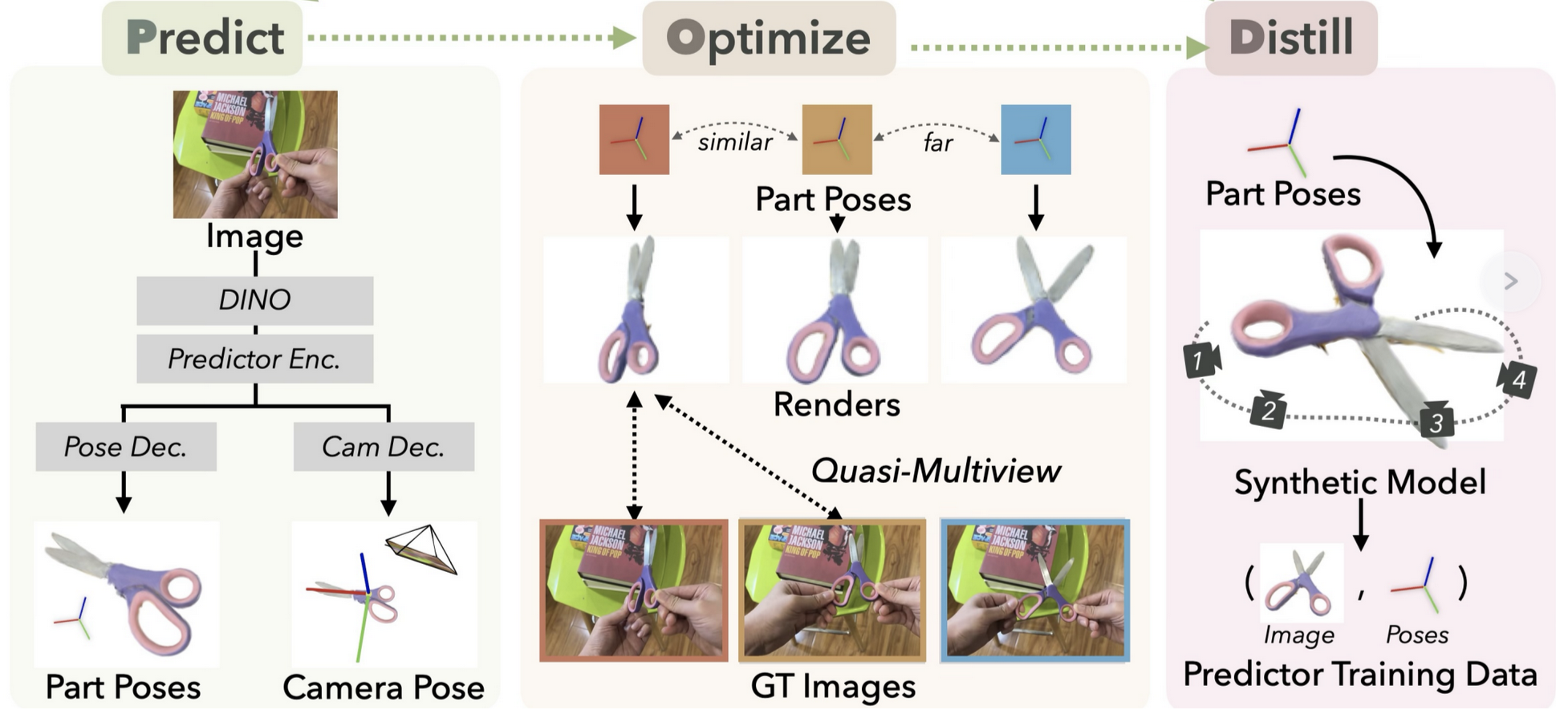
Predict-Optimize-Distill: A Self-Improving Cycle for 4D Object Understanding
Mingxuan Wu*, Huang Huang*, Justin Kerr, Chung Min Kim, Anthony Zhang, Brent Yi, Angjoo Kanazawa
ICCV 2025
arXiv Website A self-improving framework that builds intuition for predicting 3D object configurations through iterative observation, prediction, and optimization cycles.

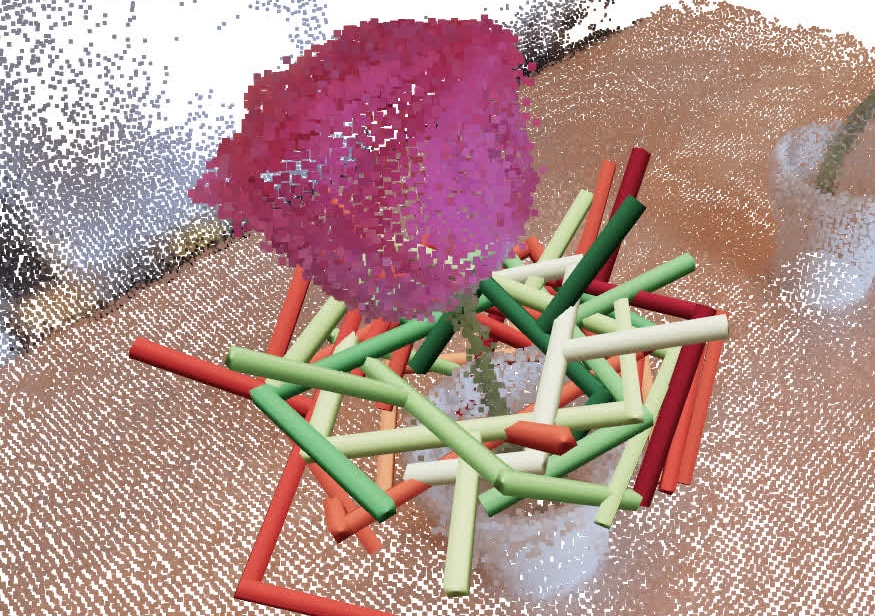
Persistent Object Gaussian Splat (POGS) for Tracking Human and Robot Manipulation of Irregularly Shaped Objects
Justin Yu*, Kush Hari*, Karim El-Refai*, Arnav Dalal, Justin Kerr, Chung Min Kim, Richard Cheng, Muhammad Zubair Irshad, Ken Goldberg
ICRA 2025
arXiv Tracking and manipulating irregularly-shaped, previously unseen objects using a single stereo camera with Gaussian splatting for object pose estimation and language-driven manipulation.
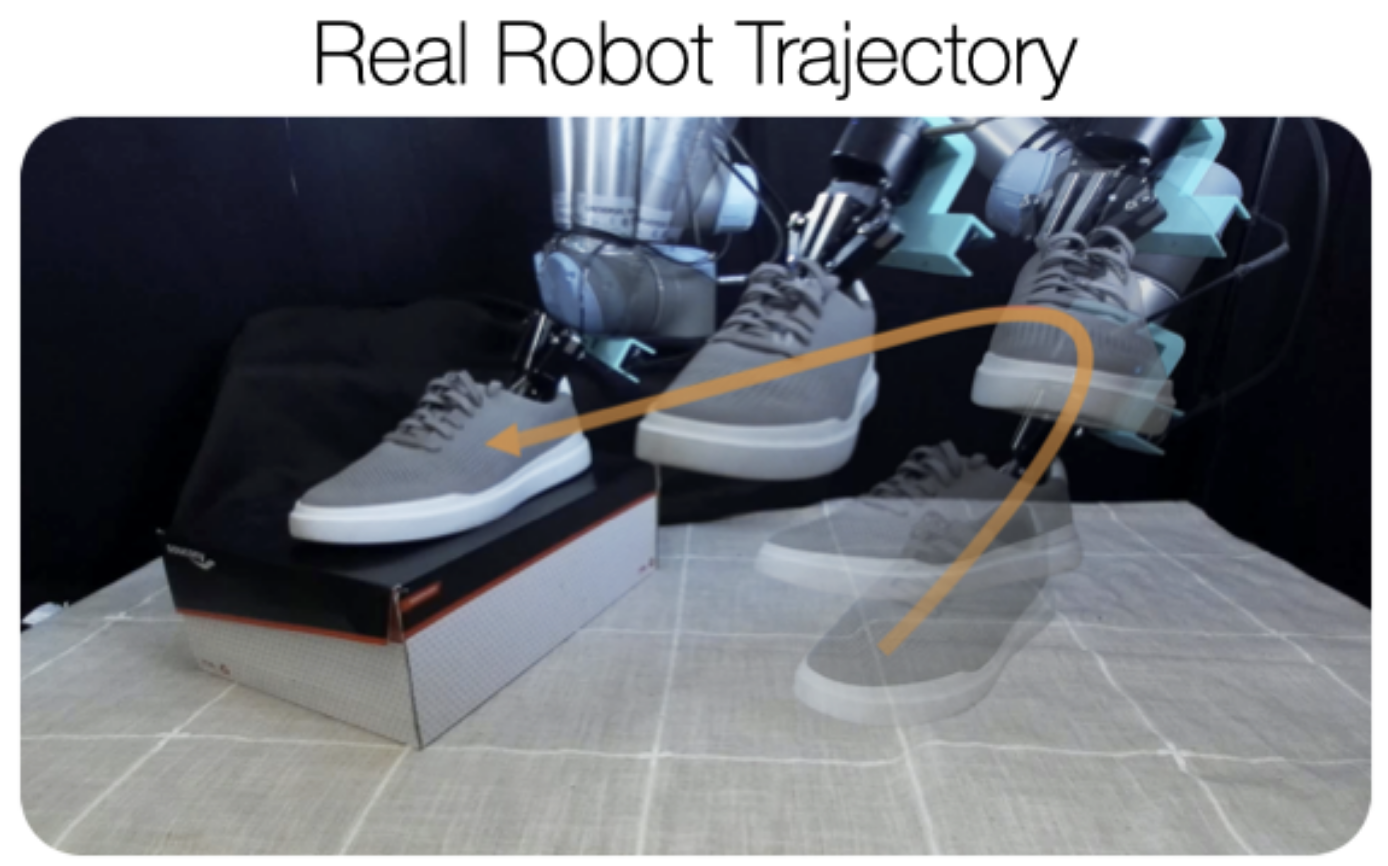
Robot See Robot Do: Imitating Articulated Object Manipulation with Monocular 4D Reconstruction
Justin Kerr*, Chung Min Kim*, Mingxuan Wu, Brent Yi, Qianqian Wang, Ken Goldberg, Angjoo Kanazawa
CoRL Oral 2024
arXiv Website Object-centric visual imitation from a single video by 4D-reconstructing articulated object motion and transfering to a bimanual robot

GARField: Group Anything with Radiance Fields
Chung Min Kim*, Mingxuan Wu*, Justin Kerr*, Ken Goldberg, Matthew Tancik, Angjoo Kanazawa
CVPR 2024
arXiv Website Hierarchical grouping in 3D by training a scale-conditioned affinity field from multi-level masks
LERF-TOGO: Language Embedded Radiance Fields for Zero-Shot Task-Oriented Grasping
Adam Rashid*, Satvik Sharma*, Chung Min Kim, Justin Kerr, Lawrence Yunliang Chen, Angjoo Kanazawa, Ken Goldberg
CoRL Oral, Best Paper Finalist 2023
arXiv Website LERF's multi-scale semantics enables 0-shot language-conditioned part grasping for a wide variety of objects.
Nerfstudio: A Modular Framework for Neural Radiance Field Development
Matthew Tancik, Ethan Weber, Evonne Ng, Ruilong Li, Brent Yi, Justin Kerr, Terrance Wang, Alexander Kristoffersen, Jake Austin, Kamyar Salahi, Abhik Ahuja, David McAllister, Angjoo Kanazawa
SIGGRAPH 2023
arXiv Website GitHub A modular PyTorch framework for Neural Radiance Fields research with plug-and-play components and real-time visualization tools.

LERF: Language Embedded Radiance Fields
Justin Kerr*, Chung Min Kim*, Ken Goldberg, Angjoo Kanazawa, Matthew Tancik
ICCV Oral 2023
arXiv Website Grounding CLIP vectors volumetrically inside a NeRF allows flexible natural language queries in 3D
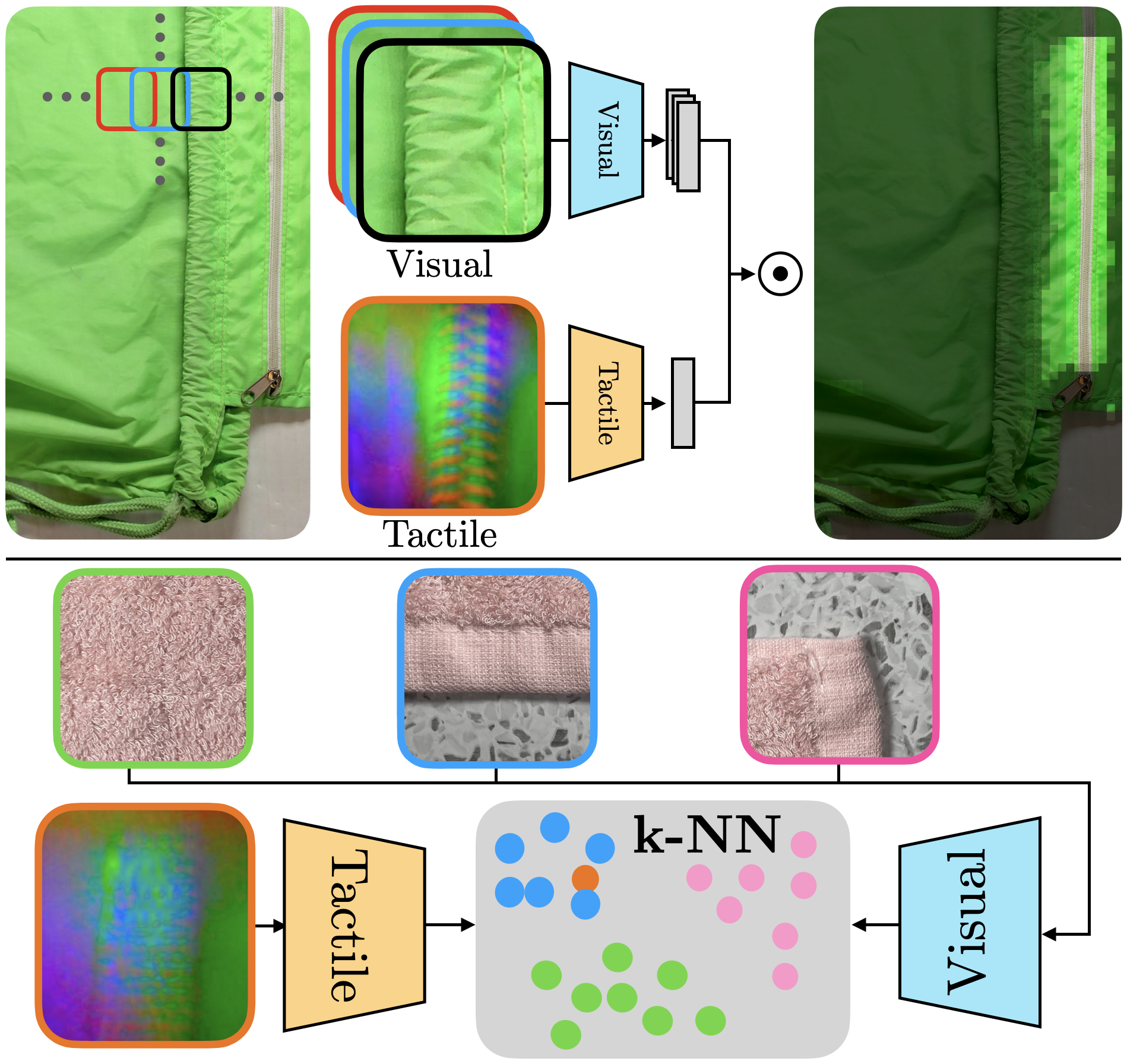
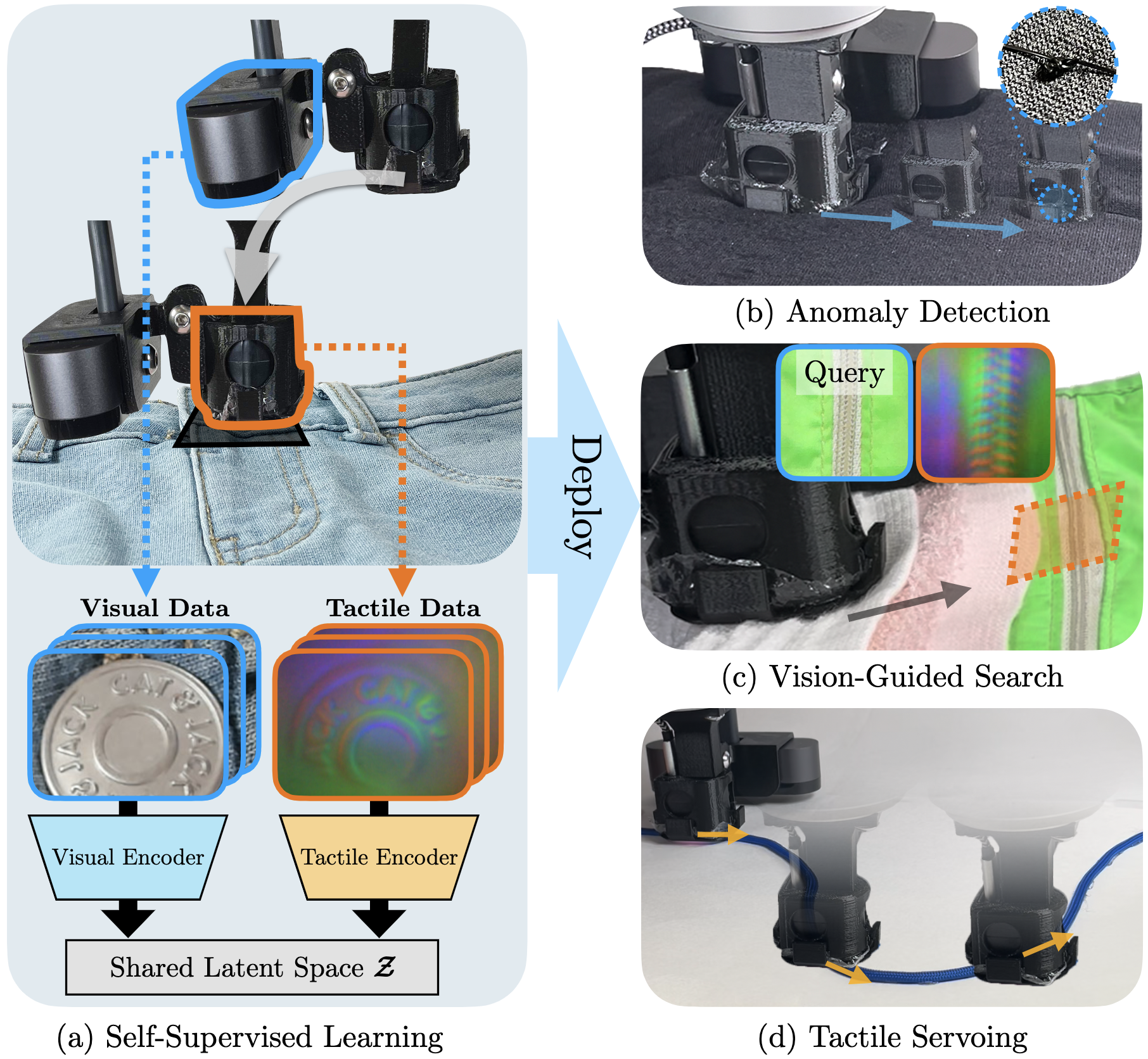
Self-Supervised Visuo-Tactile Pretraining to Locate and Follow Garment Features
Justin Kerr*, Huang Huang*, Albert Wilcox, Ryan Hoque, Jeffrey Ichnowski, Roberto Calandra, and Ken Goldberg
RSS 2023
arXiv Website We collect spatially paired vision and tactile inputs with a custom rig to train cross-modal representations. We then show these representations can be used for multiple active and passive perception tasks without fine-tuning.
Evo-NeRF: Evolving NeRF for Sequential Robot Grasping
Justin Kerr, Letian Fu, Huang Huang, Yahav Avigal, Matthew Tancik, Jeffrey Ichnowski, Angjoo Kanazawa, Ken Goldberg
CoRL Oral 2022
Website OpenReview NeRF functions as a real-time, updateable scene reconstruction for rapidly grasping table-top transparent objects. Geometry regularization speeds and improves scene geometry, and a NeRF-adapted grasping network learns to ignore floaters.
All You Need is LUV: Unsupervised Collection of Labeled Images using Invisible UV Fluorescent Indicators
Brijen Thananjeyan*, Justin Kerr*, Huang Huang, Joseph E. Gonzalez, Ken Goldberg
IROS 2022
Website arXiv
Fluorescent paint enables inexpensive (<$300) and self-supervised data collection of dense image annotations without altering objects' appearance.
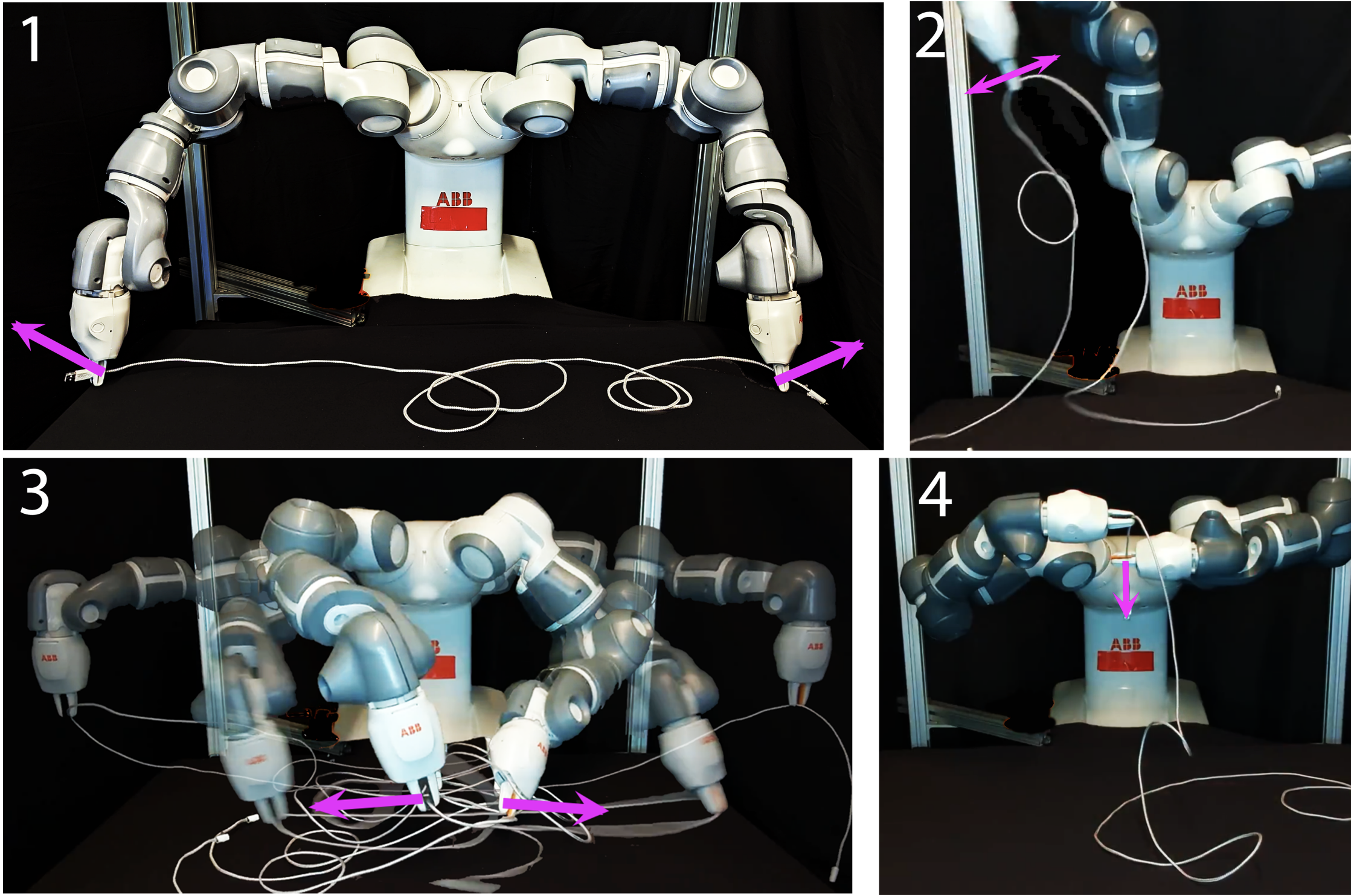

Autonomously Untangling Long Cables
Vainavi Viswanath*, Kaushik Shivakumar*, Justin Kerr*, Brijen Thananjeyan, Ellen Novoseller, Jeffrey Ichnowski, Alejandro Escontrela, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg
RSS Best Systems Paper Award 2022
Website Paper
A sliding-pinching dual-mode gripper enables untangling charging cables with manipulation primitives to simplify perception coupled with learned perception modules.

Dex-NeRF: Using a Neural Radiance Field to Grasp Transparent Objects
Jeffrey Ichnowski*, Yahav Avigal*, Justin Kerr, Ken Goldberg
CoRL 2021
Website arXiv
Using NeRF to reconstruct scenes with offline calibrated camera poses can produce graspable geometry even on reflective and transparent objects.

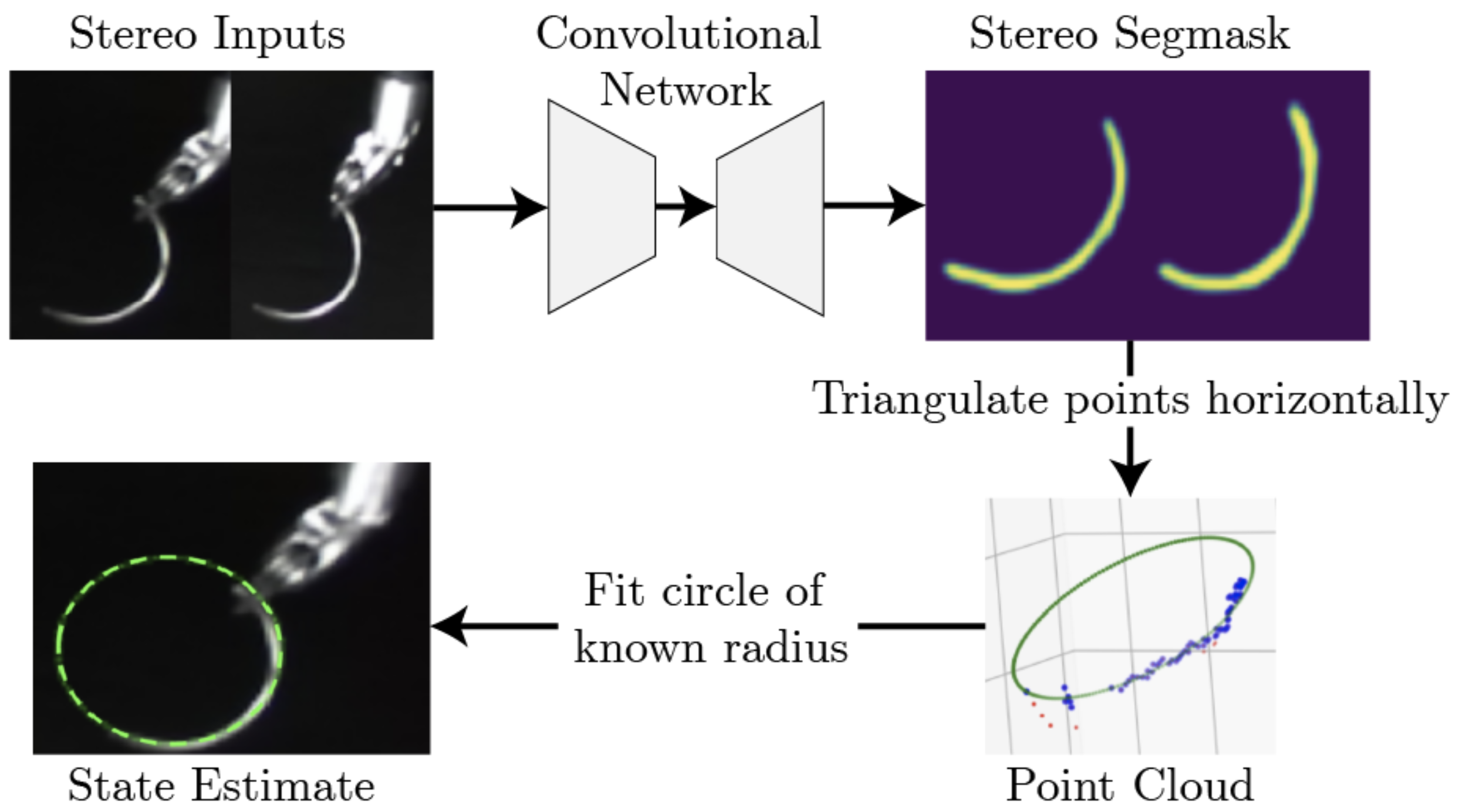
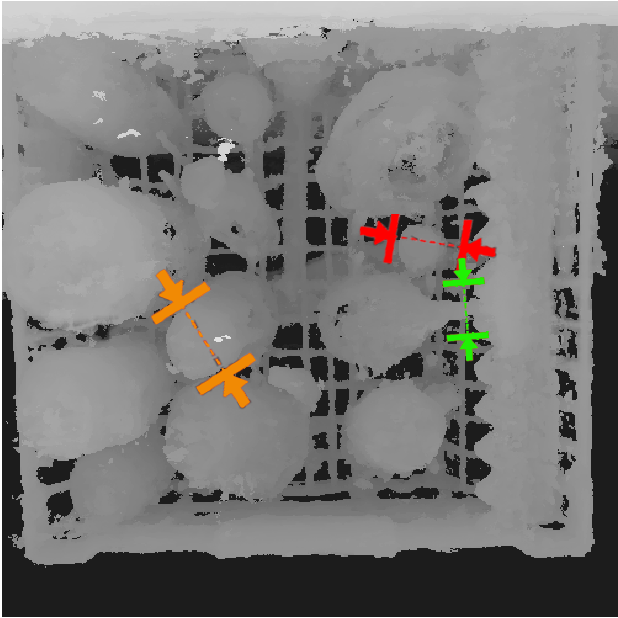
Learning to Localize, Grasp, and Hand Over Unmodified Surgical Needles
Albert Wilcox*, Justin Kerr*, Brijen Thananjeyan, Jeff Ichnowski, Minho Hwang, Samuel Paradis, Danyal Fer, Ken Goldberg
ICRA 2022
Website arXiv
Combining active perception with behavior cloning can reliably hand a surgical needle back and forth between grippers.
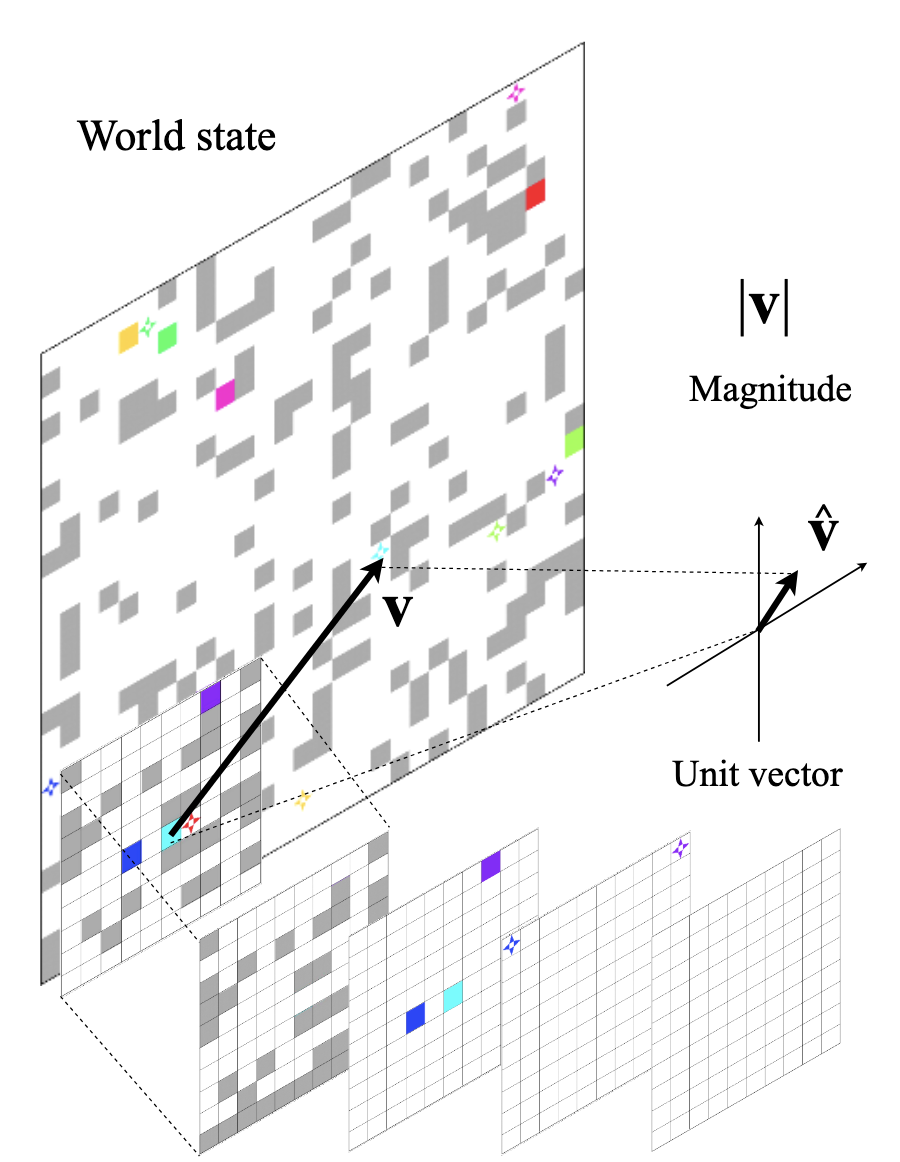
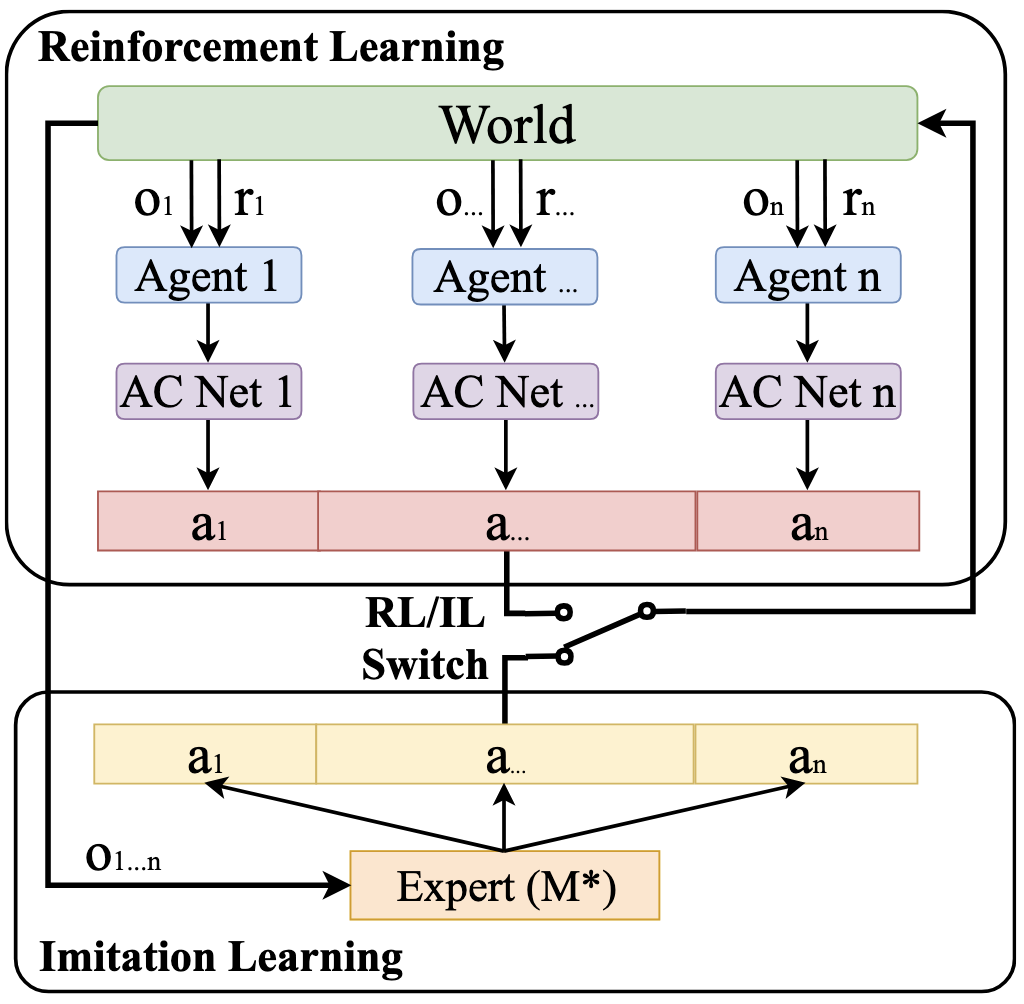
PRIMAL: Pathfinding via Reinforcement and Imitation Multi-Agent Learning
Guillaume Sartoretti, Justin Kerr, Yunfei Shi, Glenn Wagner, T. K. Satish Kumar, Sven Koenig, Howie Choset
IEEE Robotics and Automation Letters 2019
arXiv A novel framework for multi-agent pathfinding that combines reinforcement and imitation learning to teach fully decentralized policies, validated with up to 1024 agents.
Robot Systems Projects
The result of lots of COVID boredom, I designed, built, and programmed these (mostly) from scratch